hab' noch was vergessen: Sehr wichtig sind die Reifen, wenn ihr die Kraft Eurer Antriebe auch auf den Untergrund bringen wollt. Baut Eure Modelle ruhig schwer genug - 35kg scheint viel - aufgeteilt auf 8 Räder hingegen bist Du am unteren Ende - das Fahrzeug wird die Kraft nicht auf losen Untergrund bringen können, denn die Räder werden schlicht durchdrehen. Mein Uni hat eine sehr kräftigen Antrieb, kann die Antriebskraft zur Zeit jedoch nicht auf losem Untergrund in Vortrieb umsetzen, da das Fahrzeug rel. leicht ist. Ich werde mal in Zukunft auf weichere Reifen umrüsten - bringt erstaunlich viel. Frohes Werken Martin
Meinen Vorrrednern möchte ich mich anschliessen in den beiden Punkten Antrieb und Akku: Seht zu, dass die grössten Übersetzungen möglichst nahe am Antriebsrad zu liegen kommen (Stichwort Planeten). Das ganze hat nebst der besagten Schonung der Doff-Komponenten den nicht zu unterschätzenden Vorteil, dass der restliche Antriebsstrang eher klein gehalten werden kann - also beispielweise mit Zahnrädern Modul 0-5 bis 0,75 auskommen kann (je nach Getriebeabstufung). Schaut zu, dass ihr möglichst gehärtete Zahnräder einbaut in diesen Gewichtsklassen - also wie sie beispielweise bei Planetengetrieben aus Fahrradschaltungen (Nabenschaltungen) oder dergleichen daherkommen.
Beim Antriebsmotor würde ich auch mal ein Auge in Richtung den sog. Brushless Typen werfen: Die Dinger gibts heute auch bereits mit relativ geringer Drehzahl pro Volt oder wenn ihr genügend Platz habt im Modell, dann tuts auch ein herkömmlicher EMotor - schaut einfach darauf dass dieser mindestens 5 Pole besitzt (läuft "weicher"). Einen Glockenankermotor wie er beispielweise von Faulhaber stammt würde ich nicht nutzen für's Grobe, da er einem Überlast sehr übel nimmt. EMotoren aus Akkuschrauber sind sicherlich brauchbar, jedoch besitzen diese nicht den besten Wirkungsgrad (ev. vorher Akkuschrauber belasten und Stromaufnahme messen).
Auch ein herzliches Grüezi aus der Schweiz. Tönen spannend Deine beiden Projekte. Wäre super, wenn wir diese mal hier im Forum bewundern dürfen. Schöne Grüsse, Martin
Hatte auch mal einen GT500 mit Planetengetriebe in meinem Uni. Kann Sven's Ausführungen bestätigen, möchte jedoch noch was anmerken: Jedes Stirnradgetriebe mit GERADEN Stirnzahnrädern lärmt, auch wenn es noch so sauber gabaut ist. (Beim Marx-Planetegetriebe sind zudem die Zahnraeder aus einem Kunststoff, der den Effekt verstärkt). Je geringer die Drehzahldifferenzen zwischen den Stufen, resp. je geringer die Eingangsdrahzahl ist, desto leiser. Möchtest Du es leiser haben, so kannst Du beispielweiese ein Getriebe mit SCHRAEG verzahnten Stirnzahnraedern verwenden/bauen oder die Eingangsdrehzahl eines geradeverzahnten Getriebes mit Hilfe eines Riemengetriebes soweit reduzieren, dass die Drehzahlen "erträglich" werden. Noch was: Glockenankermotoren solltest Du mit Taktfrequenzen oberhalb 15kHz betreiben. Wie hoch ist die taktfrequenz des Nessel Togro? Empfehlungen zu Kaufgetrieben kann ich leider keine geben, da ich meine selbst baue. Veroma hat ein neues Getriebe im Programm, welches m.E. einen guten Eindruck macht und zudem preisgünstig ist. Dieses in Verbindung mit einer Eingangsuntersetzung (Bsp. Zahnriemen) um die (lärmige) Marx-Planetenstufe wegzubekommen wäre ev. eine Option für Dich....? Gruss, Martin
Hallo Wolf Habe verstanden, dass der Motor mit angeschlossener (ausgeschlachteter) Servoelektronik läuft, korrekt? Ich gehe davon aus, dass Du das (ausgeschlachtete) Poto das noch immer mit der Servoelektronik verbunden ist in den Händen hältst oder direkt an die Achse des Schneckenrades geflansct hast beim Test, korrekt? Hast Du eine a) separate Speisung für den EMotor, oder b) hängen sowohl Emotor und Servoelektronik an derselben Spannungsquelle? Was für ein Servo hast DU ausgeschlachtet? Vergiss nicht, dass Dein EMotor weniger als 100mA aufnimmt wenn er nicht belastet ist, also Deine Servoelektronik damit klarkommt. Belastest Du das Ding (also beim Fahren), so besteht die Möglichkeit, dass Deine Servoelek. diesen Strom nicht mehr treiben kann und abraucht.
Falls a) Versuch mal folgendes: - Vertausche die beiden Anschlüsse von der Servoelektronik zum EMotor - Schalte erst Spannunsgversorgung der Servoelek. ein und erst dann die für den Emotor (fange mal bei z.B. bei 5 Volt an) --> der Emot sollte sich drehen und stehenbleiben, falls nicht drehe mal am Poti langsam rum --> bleibt er irgendwann stehen? --> falls nicht, welchsle Spannunsgversorgung (Plus Minus) des EMotors erneut und wiederhole den Vorgang.
Hallo Giovanni Ein absoluter Hingucker Dein MAN. Die Photos kann man lange betrachten und man entdeckt immer wieder neue Details. Ich hoffe, ich habe mal die Gelegenheit, Dein Modell in Natura anschauen zu können.
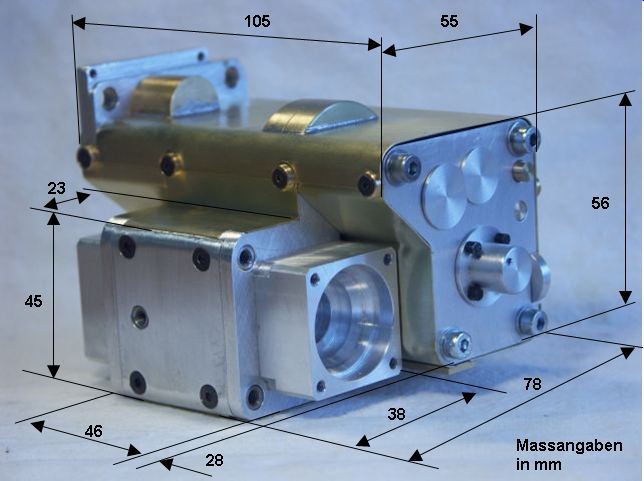
Hallo Jürgen Anbei die (circa) Abmessungen meines Getriebes:
Nein, ich verkaufe keine Modellteile irgendwelcher Art. Ist bloss ein Hobby für mich, für das (leider) zu wenig Zeit zur Verfügung steht. Deshalb habe ich auch keine zeitlichen Möglichkeiten, für andere Modellbauer Teile herzustellen. Seit kurzem gibt es ein 3-Gang-Getriebe des Herstellers Veroma, welches m.E. einen hochwertigen Eindruck macht und zudem sehr kostengünstig ist. Vielleicht wäre das was für Dein Projekt? Stell doch mal ein paar Photos Deines Projektes hier ein. Tönt interessant.
Habe mal kurz Herrn Google zu den Reifendimensionen für den U404 angefragt: 10.00/10.50-20 (=Diagonalreifen). Das Ding ist also 10 Zoll / 10,5 Zoll breit (=254mm/266mm), hat einen Felgenbettdurchmessser von 20 Zoll (=508mm). Leider habe ich keine weiteren Angaben für die beim U404 eigensetzten Reifen gefunden, also dem eigentlichen Aussendurchmesser, nehme jedoch an, dass es sich dabei um einen "Standartreifen" im Bereich von 1000mm Aussendurchmesser handeln dürfte. Ich schätze, die Uni-S gab es wie "mein" U2150 ebenfalls mit unterschiedlicher Bereifung. Für Dich würde dies bedeuten, dass Du u.U. mit Modellreifen im Bereich 95-110mm Aussendurchmesser durchaus leben könntest. Wie Du schon gesagt hast z.B. bei Barnhausen. Solche Modellreifen weisen einen relativ geringen Innendurchmesser (Felge) auf, welche Dir u.U. keinen Platz für allfällige Portale lassen. Husemann scheint ev. Felgen (ev. auch Reifen) für Deinen Uni im Programm zu haben (http://www.automodellbau-husemann.de/Rei...ifenFelgen.html). Tipp: Suche auch mal bei den kleineren Masstäben nach passenden Felgen. Bei einem Reifen-Innendurchmesser im Bereich von 45 bis 55mm findest Du einige Angebote.
Hallo Marcy Sieht super aus Dein Uni-S Fahrerhaus. Hast Du bereits schon Komponenten im Bereich Antriebsstrang oder Rahmen gebaut? Wird das Modell militärischen Charakter haben (oft bei Uni-S) oder hast Du Dir ein ziviles Vorbild ausgesucht? Schöne Grüsse, Martin
@Frank Auf den ersten Blick mögen die Begriffe für einen "Nicht-Elektriker" ein wenig verwirrend sein, aber bei mehrmaligen Lesen wird es sicherlich verständlicher; bloss nicht einschüchtern lassen ;-) Ansonsten kannst Du jederzeit Fragen stellen (nicht vergessen: es gibt keine dummen Fragen) Die Anleitung im Anschluss an die Tabelle (Bsp. beim GT300) ist durchaus hilfreich um einen Antrieb zu dimensionieren, da Marx (zur damaligen Zeit) alle notwendigen Angaben im Datenblatt (resp. Datentabelle) aufgeführt hat. Viel Erfolg!
Schau mal unter folgendem Beitrag nach: http://www.das-baumaschinen-forum.de/thr...readid=1476&sid= Da findest Du wahrscheinlich ein paar Antworten zum konstruktiven Aufbau. Fixfertige Zeichnungen wirst Du wahrscheinlich kaum finden.
@Frank: Gern geschehen. Ich schätze, dass Dein Diagramm nicht die Leerlaufdrehzahl darstellt. Ev. findest Du auf Deinem Diagramm dazu einen Hinweis unter welchen Belastungen die Drehzahlen gemessen worden sind. Wie auch immer, kommst Du klar mit den obigen Angaben?
@Magnum: Werde mal versuchen die Datenblätter als pdf ins Netz zu stellen. Gib mir aber ein paar Tage Zeit -ok?
Über die aktuelle Geschäftstätigkeit der Firma kann ich keine Angaben machen. Es gibt Stimmen, welche behaupten, dass der urspüngliche Besitzer/Gründer infolge fortgeschrittenen Alters das Unternehmen verkauft haben soll. Unter http://www.marx-mot.de findest Du die aktuelle Anschrift, aber leider keine Datenblätter oder dergleichen. Ich habe mal in meinen alten Unterlagen gestöbert und habe ein Datenblatt der GT500-er Reihe ausgegraben: Von diesen gab (gibt?) es zehn verschiedene Typen, beginnend mit 500/4 bis und mit 500/21. Die Zahl hinter dem Schrägstrich ist der Indikator für die spezifische Drehzahl pro Volt. Alle Typen haben dieselbe Leistung. Dein Typ 500/5 hat eine spezifische Drehzahl von 1'600 1/min pro Volt. Betriebst Du Deinen 500/5 also mit einer Versorgungsspannung von 12V=, so ergibt sich eine Leerlauf-Drehzahl von 12 x 1'600 1/min = 19'200 1/min. Die übliche Zellenzahl für diesen Typen ist 7 bis 8 Zellen (sprich 8,4V bis 9,6V) und der empfohlene Arbeitsbereich (belastet) liegt zwischen 5V bis 14V auch gemäss Datenblatt. Das Ding wird demzufolge problemlos an 12V laufen, nur eben dreht er dann ziemlich hoch - jenachdem was Du mit dem Ding anstellen willst musst Du diese Drehzahlen halt reduzieren. Der maximal zulässige Dauerstrom für diesen 500/5 beträgt laut Datenblatt 36A. Du hast aus der 500er-Typenreihe eher einen "Schnellläufer" angeschafft (niedrige Zahl hinter Schrägstrich). Die "Langsamläufer" sind diejenigen mit niedriger spezifischer Drehzahl pro Volt (hohe Zahl hinter Schrägstrich).
Noch ein paar Werte die Dich wahrscheinlich interessieren werden für den 500/5: Laststrom pro Ncm: 1,5 A/Ncm Drehzahlminderung pro Ncm: 110 U/min
Hallo Sven Im Testaufbau lässt sich das Getriebe auch unter leichter Belastung (Abbremsen Antriebsachse oder Zapfwelle mit Zeigefinger und Daumen) noch problemlos schalten und zwar über praktisch den gesamten Drehzahlbereich des EMotors. Ich bin gespannt, ob das Schalten auch so zuverlässig funktioniert wenn das Fahrzeug schiebt (Bsp. Talfahrt). Die aktuelle Ansteuerung findet durch zwei selbstgebaute "Geber" mit federbelastet Schaltkulissen statt (Haupt- und Gruppengetriebe) welche in der Fernsteuerung am Platz der beiden Schieberegler (FC16) singebaut sind. Damit lässt sich das Getriebe simpel und komfortabel schalten. Das mit der "Tiptronic" ist wie gesagt eine mögliche Alternative, die nur dann zum Zug kommen würde, wenn mir mal in Zukunft zwei Propkanäle fehlen sollten. Das wird wohl noch laaaaange dauern bis ich mal bei der Hydraulik angelangt bin :-) --> Photos von diesen Ein/Umbauten werde ich ein den nächsten Wochen mal anfertigen und ins Netz stellen.
Hallo Sven Da meine Vorderachse noch nicht fertiggestellt ist, wirds auch nichts mit Testen (und bei schönem Wetter ziehts mich nicht in die Werkstatt...). Zu Deiner Frage, ob 6 Gänge Sinn machen: Ich denke nicht, da der EMotor durch seine Drehzahl/Drehmomentcharakeristik (im Gegensatz zum VB Motor) quasi Zwischengänge beisteuert. Ich kann mir durchaus vorstellen, dass 3 Gänge auch reichen: ein Kriechgang, ein Schnellgang und etwas dazwischen.
Was mich dazu bewogen hat, ein 3-Ganggetriebe mit nachfolgender Gruppenschaltung zu bauen ist a)es hat mich einfach gereizt, so ein Getriebe zu bauen b)EMot wird in den unterschiedlichen Fahrsituationen möglichst immer innerhalb seines besten Wirkungsgrades betrieben.
Die von Dir erwähnte Schaltung ist mir bekannt. Der Umstand, zwei Propkanäle zu "verschwenden" war für mich nicht relevant. Falls in Zukunft (Bsp. Hydraulik) zu wenig Propkanäle vorhanden sind, so werde ich die beiden Schaltservos alternativ mittels einer kleinen Elektronik ansteuern und dieser nur noch die beiden Schaltbefehle (Impulse) Hoch- oder Runterschalten übermitteln. Diese "Schaltimpulse" würden via Multiswitch zur besagten Elektronik gelangen. Diese "kleine Elektronik" könnte beispielweise eine Kombination eines kleinen PWM-Gebers (gibts als IC's in versch. Ausführungen für kleine Leistungen), angesteuert beispielweise von einer CControl (liegt bei mir noch in der Karsumpelschublade) sein, welche einfach realisiert werden kann.
Aber Du hast sicherlichrecht, einfacher ginge es auch, aber eben... der "Basteltrieb" ist manchmal stärker :-) Ich freue mich auf jeden Fall, wenn mein Uni mal fährt und die Praxis selbst Antworten auf Ideen, Fragen und Erwartungen aus der Planungszeit liefert ;-) Ich lasse es Dich/ Euch auf jeden Fall wissen.
Nebts der recht populären Pumpe der Firma Jung gibt es beispielsweise noch den Hersteller Marzocchi (http://www.marzocchi.com/eng/pompe/default.asp) der ebefalls kleine Hydraulikpumpen mit gutem Wirkungsgrad herstellt. Für meine zukünftige Hydraulik werde ich versuchen, eine Pumpe dieses Herstellers zu beschaffen. Leider gibt es deren kleinstes Modell (Grösse ca. wie ein Aggregat von Leimbach) nicht mehr seit einigen Jahren. --> Die Produkte findest Du unter anderem auch unter folgendem Weblink: http://www.tecoshop.ch/cgi-bin/supply.st...page?entry=maag, unter --> Hydraulikkomponenten --> Pumpen --> Zahnradpumpen
Hallo Sven Die Getriebeplatten wurden von Hand mit Übermass ausgesägt und anschliessend im Paket auf der Fräsmaschine mittels Stirnwalzenfräser auf Mass gebracht. Die inneren Ausschnitte sind teils mit Schaftfräser ausgefräst, die Radien auf der Unterseite sind durch Feilen entstanden. Alle Bohrungen in den Getriebeplatten (Lagersitze, Schaltstangen, EMot-befestigungen) wurden wiederum im Paket auf der Fräsmaschine hergestellt. Sämtliche Wellen, Lagersitze der Zahnräder, Adapter, Flansche etc. sind auf der Drehmaschine entstanden. Die drei 2mm-Passfedernuten in der Hauptwelle sind wiederum im Schraubstock auf der Fräsmaschine gefräst. Die Teilkreis-Langlöcher der Mitnehmer entstanden mittels Teilapparat auf der Fräsmaschine. Die Blecharbeiten sind wiederum reine Handarbeiten mit Ausnahme des Zuschnittes, welcher mittels einer kleinen Abschermaschine (Profiform) eines Bekannten ausgeführt worden ist.
Zu den Maschinen: Zu Beginn des Projektes besasss ich eine kleine Emco Unimat 5 mit Fräsaufsatz, welche zwischenzeitlich durch separate Maschinen ersetzt wurden: Drehmaschine Wabeco D4000E, Fräsmaschine Wabeco F1210E (Ex-Vorführmaschinen)
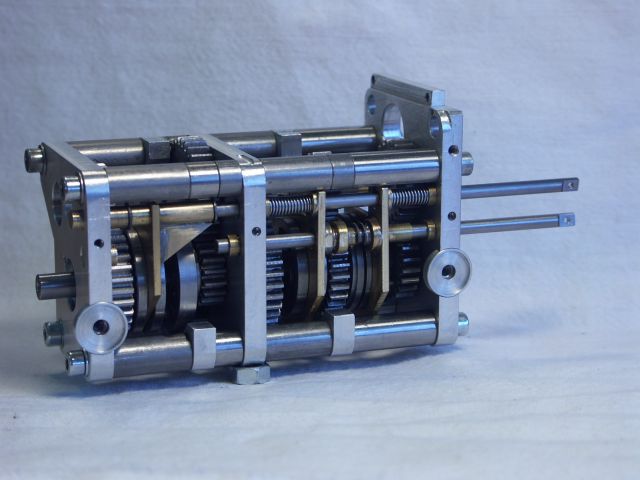
Ah ja... stabil ist die Sache auf jeden Fall :) Da das Getriebe auch Kräfte aufnehmen muss, welche durch die Schubrohre / Achsen einwirken, muss das Getriebe diese Kräfte an den Rahmen weitergeben können, ohne sich zu verwinden. Du kannst erkennen, dass die Hauptwelle dreifach (!) kugelgelagert ist (links, mitte, rechts). Dies kann man nur erreichen, indem die Lageraufnahmen absolut in der selben Flucht liegen und zwar auch nachdem das "Gehäuse" zerlegt und wieder zusammengesetzt worden ist. Ich würde bei einem nächsten Getriebe auf jeden Fall wieder dasselbe Prinzip für das "Grundgerüst" anwenden, da es schnell und einfach herzustellen ist und wie gesagt den grossen Vorteil hat, dass sämtliche Bohrungen immer fluchten beim erneuten Zusammenbau.
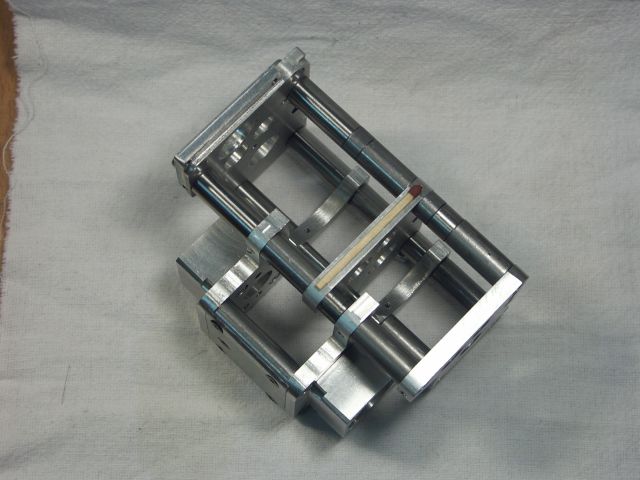
Um dieses Forum-Thema mal anzustossen, stelle ich mal mein Eigenbau-Getriebe für meinen 1:8 Unimog vor, welches kurz vor dem ersten Einsatztest steht. Ich bin nicht sicher, ob sich jemand dafür interessiert resp. was genau von Interesse ist. Der Eine oder Andere kennt vielleicht bereits die dazugehörende Beschreibung auf http://www.makau.ch, also lass ich mal ein paar Bilder sprechen.
Seit diese Photos aufgenommen wurden, sind noch kleinere Änderungen vorgenommen worden um das Schalten zu vereinfachen (zusätzliche Rückholfeder zwischen den Schaltklauen des Hauptgetriebes). Was gibt es sonst noch zu erzaehlen....? Vielleicht einen Hinweis für andere Selbstbauer: Ich habe Passfedern verwendet bei den Mitnehmern. Passfedern sind eigentlich nicht gedacht für bewegliche Wellenverbindungen - zumindest in der Industrie. Beim Gruppengetriebe sowie dem Mitnehmer für den 1./2. Gang des Hauptgetriebes funktioniert das Schalten reibungslos, da diese Passfedern nicht länger als 12mm sind und die Schaltwege im Bereich von +/-4mm. Beim 3.Gang des Hauptgetriebes jedoch legt der Mitnehmer eine grössere Strecke zurück, sodass die Passfeder aus der Nut gehoben werden kann / wird bei höheren Drehzahlen und sich somit der Mitnehmer verklemmt (Eine Lösung ist in Sicht). Fazit für Eigenbauer: Bei Streckenbewegungen, welche mehr als die Hälfte der Dicke des Mitnehmers betragen sollte man auf einen Mehrkantmitnehmer ausweichen (4-Kant, 6-Kant).
Fragen oder Anregungen sind immer willkommen. Ich würde mich freuen, von anderen Modellbauern zu hören, welche ebenfalls Eigenbaugetriebe hergestellt haben und wie Eure Lösung so aussehen. Hat schon mal jemand ein Ziehkeilgetriebe gebaut für sein Modell?
 Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden



 06.03.2007 23:20
06.03.2007 23:20